Welcome to MDGSF's Blog!
This is my github blog-
[Lua-love2d] 打开调试窗口
love –console Snake
equivalent to setting t.console=true in conf.lua
-
[Lua-love2d] 检测两个2D平面上2个矩形是否重叠
function collisions.check_rectangles_overlap(a, b) local overlap = false if not( a.x + a.width < b.x or b.x + b.width < a.x or a.y + a.height < b.y or b.y + b.height < a.y ) then overlap = true end return overlap end
-
[Nginx] 红黑树
源文件如下:
nginx-1.13.1\src\core\ngx_rbtree.h
nginx-1.13.1\src\core\ngx_rbtree.c
红黑树原理
http://blog.csdn.net/yang_yulei/article/details/26066409
http://www.cs.princeton.edu/~rs/talks/LLRB/LLRB.pdf
http://www.cs.princeton.edu/~rs/talks/LLRB/RedBlack.pdf
https://github.com/julycoding/The-Art-Of-Programming-By-July/blob/master/ebook/zh/03.01.md
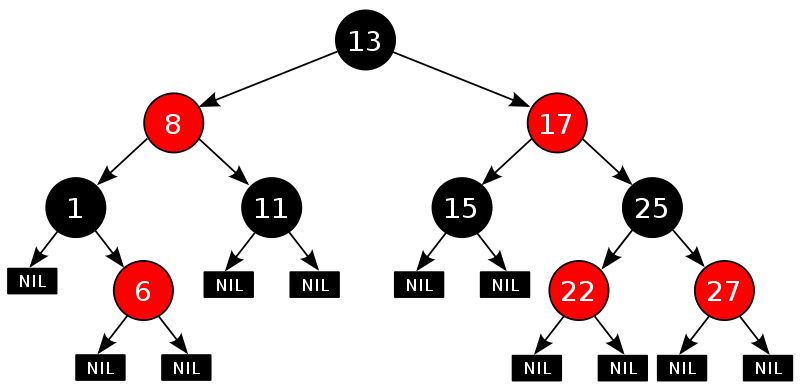
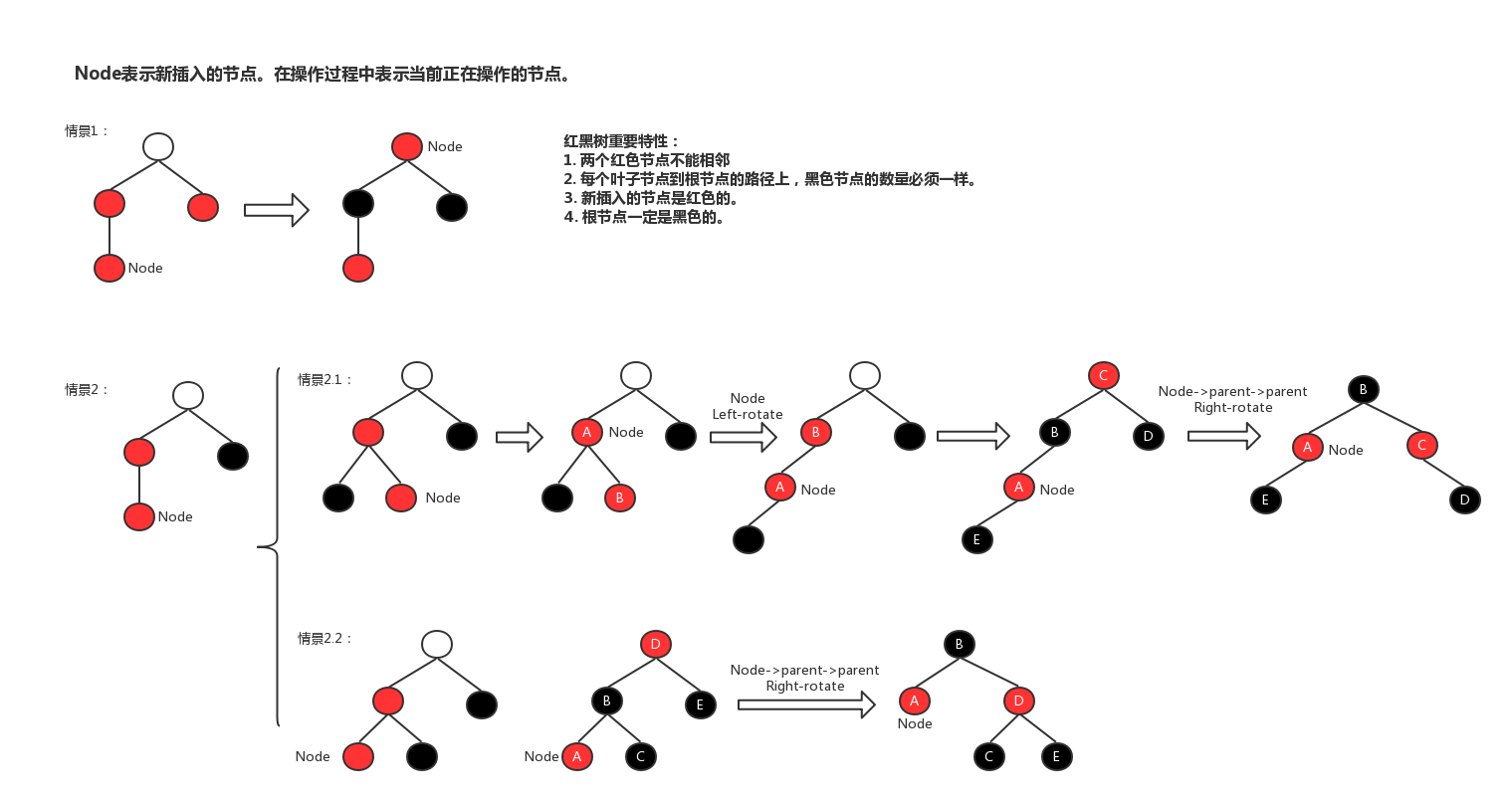
红黑树的5条性质:
1)每个结点要么是红的,要么是黑的。
2)根结点是黑的。
3)每个叶结点(叶结点即指树尾端NIL指针或NULL结点)是黑的。
4)如果一个结点是红的,那么它的俩个儿子都是黑的。
5)对于任一结点而言,其到叶结点树尾端NIL指针的每一条路径都包含相同数目的黑结点。
2-3树 和 红黑树
2-3树是完美平衡,就是说从根节点到每一个叶子节点都有相同的高度。
用2-3树来理解红黑树很简单。
2节点: 1个key,2个儿子。
3节点: 2个key,3个儿子。
红色节点: 相当于3节点。红色表示指向该节点的连接是红色的,红色的连接永远是左儿子。
黑色节点: 相当于2节点。黑色表示指向该节点的连接是黑色的,黑色的连接可以是左儿子,也可以是右儿子。 所有叶子节点到根节点的黑色连接数量是一样的。
2-3-4树 和 红黑树
不过nginx中的红黑树应该是相当于2-3-4树。
Perfect balance. Every path from root to leaf has same length.
2-node: one key, two children.
3-node: two keys, three children.
4-node: three keys, four children.
在2-3-4树中,3-node转为左斜杠为红色的红黑树。
在2-3-4树中,4-node转为左右斜杠为红色的红黑树。
基础数据结构
```c typedef ngx_uint_t ngx_rbtree_key_t; typedef ngx_int_t ngx_rbtree_key_int_t;
typedef struct ngx_rbtree_node_s ngx_rbtree_node_t;
struct ngx_rbtree_node_s { ngx_rbtree_key_t key; ngx_rbtree_node_t *left; ngx_rbtree_node_t *right; ngx_rbtree_node_t *parent; u_char color; u_char data; };
typedef struct ngx_rbtree_s ngx_rbtree_t;
typedef void (*ngx_rbtree_insert_pt) (ngx_rbtree_node_t *root, ngx_rbtree_node_t *node, ngx_rbtree_node_t *sentinel);
struct ngx_rbtree_s { ngx_rbtree_node_t *root; ngx_rbtree_node_t *sentinel; ngx_rbtree_insert_pt insert; };
#define ngx_rbtree_init(tree, s, i)
ngx_rbtree_sentinel_init(s);
(tree)->root = s;
(tree)->sentinel = s;
(tree)->insert = i
-
[Nginx] palloc 内存分配
用到的结构体定义
/* * NGX_MAX_ALLOC_FROM_POOL should be (ngx_pagesize - 1), i.e. 4095 on x86. * On Windows NT it decreases a number of locked pages in a kernel. */ #define NGX_MAX_ALLOC_FROM_POOL (ngx_pagesize - 1) #define NGX_DEFAULT_POOL_SIZE (16 * 1024) #define NGX_POOL_ALIGNMENT 16 #define NGX_MIN_POOL_SIZE \ ngx_align((sizeof(ngx_pool_t) + 2 * sizeof(ngx_pool_large_t)), \ NGX_POOL_ALIGNMENT) typedef void (*ngx_pool_cleanup_pt)(void *data); typedef struct ngx_pool_cleanup_s ngx_pool_cleanup_t; struct ngx_pool_cleanup_s { ngx_pool_cleanup_pt handler; void *data; ngx_pool_cleanup_t *next; }; typedef struct ngx_pool_large_s ngx_pool_large_t; struct ngx_pool_large_s { ngx_pool_large_t *next; void *alloc; }; typedef struct { u_char *last; u_char *end; ngx_pool_t *next; ngx_uint_t failed; } ngx_pool_data_t; struct ngx_pool_s { ngx_pool_data_t d; size_t max; ngx_pool_t *current; ngx_chain_t *chain; ngx_pool_large_t *large; ngx_pool_cleanup_t *cleanup; ngx_log_t *log; }; typedef struct { ngx_fd_t fd; u_char *name; ngx_log_t *log; } ngx_pool_cleanup_file_t;-
先不管这些结构体什么意思。
-
ngx_log_t 是用来输出日志的,直接忽略它的存在。
ngx_align 内存对齐
#define ngx_align(d, a) (((d) + (a - 1)) & ~(a - 1)) #define ngx_align_ptr(p, a) \ (u_char *) (((uintptr_t) (p) + ((uintptr_t) a - 1)) & ~((uintptr_t) a - 1))ngx_alloc
就只是对malloc的调用。
/* @brief: 分配一块内存空间。 @param size[in]: 要分配的内存空间大小,单位:字节。 @param log: 日志输出。 @return : 返回值是指向分配好的内存空间首地址。 */ void * ngx_alloc(size_t size, ngx_log_t *log) { void *p; p = malloc(size); if (p == NULL) { ngx_log_error(NGX_LOG_EMERG, log, ngx_errno, "malloc(%uz) failed", size); } ngx_log_debug2(NGX_LOG_DEBUG_ALLOC, log, 0, "malloc: %p:%uz", p, size); return p; }ngx_calloc
#define ngx_memzero(buf, n) (void) memset(buf, 0, n) /* @brief: 分配一块内存空间,并把分配好的空间清零。 @param size[in]: 要分配的内存空间大小,单位:字节。 @param log: 日志输出。 @return : 返回值是指向分配好的内存空间首地址。 */ void * ngx_calloc(size_t size, ngx_log_t *log) { void *p; p = ngx_alloc(size, log); if (p) { ngx_memzero(p, size); } return p; }ngx_create_pool
/* @brief: 创建一个内存池对象。 @param size[in]: 要分配的内存大小。 @param log: 日志输出。 @return: 返回一个内存池对象的指针,失败返回NULL。 */ ngx_pool_t * ngx_create_pool(size_t size, ngx_log_t *log) { ngx_pool_t *p; //申请一块size大小的内存空间,以NGX_POOL_ALIGNMENT=16对齐。 p = ngx_memalign(NGX_POOL_ALIGNMENT, size, log); if (p == NULL) { return NULL; } p->d.last = (u_char *) p + sizeof(ngx_pool_t); p->d.end = (u_char *) p + size; p->d.next = NULL; p->d.failed = 0; //这里p->max最大只能为NGX_MAX_ALLOC_FROM_POOL=4096 on x86 size = size - sizeof(ngx_pool_t); p->max = (size < NGX_MAX_ALLOC_FROM_POOL) ? size : NGX_MAX_ALLOC_FROM_POOL; p->current = p; p->chain = NULL; p->large = NULL; p->cleanup = NULL; p->log = log; return p; }需要说明的是size的选择,size的大小必须小于等于NGX_MAX_ALLOC_FROM_POOL,且必须大于sizeof(ngx_pool_t)。
选择大于NGX_MAX_ALLOC_FROM_POOL的值会造成浪费,因为大于该限制的空间不会被用到。
选择小于sizeof(ngx_pool_t)的值会造成程序崩溃。由于初始大小的内存块中要用一部分来存储ngx_pool_t这个信息本身。
ngx_memalign
http://mdgsf.github.io/linux/2017/08/07/linux-memalign.html
/* @brief: 如果memalign() 或者 posix_memalign() 可以只用,那就用这两个函数申请一块对齐的内存空间; 否则的话,就调用malloc()申请一块空间。 */ /* * Linux has memalign() or posix_memalign() * Solaris has memalign() * FreeBSD 7.0 has posix_memalign(), besides, early version's malloc() * aligns allocations bigger than page size at the page boundary */ #if (NGX_HAVE_POSIX_MEMALIGN || NGX_HAVE_MEMALIGN) void *ngx_memalign(size_t alignment, size_t size, ngx_log_t *log); #else #define ngx_memalign(alignment, size, log) ngx_alloc(size, log) #endif ///////////////////////////////////////////////////////////////// #if (NGX_HAVE_POSIX_MEMALIGN) void * ngx_memalign(size_t alignment, size_t size, ngx_log_t *log) { void *p; int err; err = posix_memalign(&p, alignment, size); if (err) { ngx_log_error(NGX_LOG_EMERG, log, err, "posix_memalign(%uz, %uz) failed", alignment, size); p = NULL; } ngx_log_debug3(NGX_LOG_DEBUG_ALLOC, log, 0, "posix_memalign: %p:%uz @%uz", p, size, alignment); return p; } #elif (NGX_HAVE_MEMALIGN) void * ngx_memalign(size_t alignment, size_t size, ngx_log_t *log) { void *p; p = memalign(alignment, size); if (p == NULL) { ngx_log_error(NGX_LOG_EMERG, log, ngx_errno, "memalign(%uz, %uz) failed", alignment, size); } ngx_log_debug3(NGX_LOG_DEBUG_ALLOC, log, 0, "memalign: %p:%uz @%uz", p, size, alignment); return p; } #endifngx_palloc 和 ngx_pnalloc
/* @brief:从内存池pool中分配一块大小为size的内存,此函数分配的内存的起始地址按照NGX_ALIGNMENT进行了对齐。对齐操作会提高系统处理的速度,但会造成少量内存的浪费。 @param pool[in]: 内存池pool。 @param size[in]: 要分配的内存大小。 @return: 返回执行分配的内存空间的首地址。 */ void * ngx_palloc(ngx_pool_t *pool, size_t size) { #if !(NGX_DEBUG_PALLOC) if (size <= pool->max) { return ngx_palloc_small(pool, size, 1); } #endif return ngx_palloc_large(pool, size); } /* @brief:从内存池pool中分配一块大小为size的内存,没有进行内存对齐。 @param pool[in]: 内存池pool。 @param size[in]: 要分配的内存大小。 @return: 返回执行分配的内存空间的首地址。 */ void * ngx_pnalloc(ngx_pool_t *pool, size_t size) { #if !(NGX_DEBUG_PALLOC) if (size <= pool->max) { return ngx_palloc_small(pool, size, 0); } #endif return ngx_palloc_large(pool, size); }可以看到,当size <= pool->max 时,调用ngx_palloc_small()。否则调用ngx_palloc_large()。
ngx_palloc_small
/* @brief:从内存池pool中分配一块大小为size的内存。 @param pool[in]: 内存池pool。 @param size[in]: 要分配的内存大小。 @param align[in]: 1:内存对齐, 0:内存没有对齐。 @return: 返回执行分配的内存空间的首地址。 */ static ngx_inline void * ngx_palloc_small(ngx_pool_t *pool, size_t size, ngx_uint_t align) { u_char *m; ngx_pool_t *p; p = pool->current; do { m = p->d.last; if (align) { m = ngx_align_ptr(m, NGX_ALIGNMENT); //对齐内存指针。 } if ((size_t) (p->d.end - m) >= size) { //如果当前的ngx_pool_t对象中的内存空间足够,那就直接返回。 p->d.last = m + size; return m; } p = p->d.next; //到下一个ngx_pool_t对象中去查找,这是一个链表结构。 } while (p); return ngx_palloc_block(pool, size); } /* @brief: 这个函数做了两件事: 1. 为ngx_pool_t对象分配一个新的内存节点,新的节点的大小和pool一样大,链表结构, pool.d.next = new ngx_pool_t。 2. 然后从这个新的节点上分配出size大小的内存来使用。 @param pool[inout]: 要增加新的节点的内存池。 @param size[in]: 要分配的内存大小。 @return: 返回size大小的内存空间的首地址。 */ static void * ngx_palloc_block(ngx_pool_t *pool, size_t size) { u_char *m; size_t psize; ngx_pool_t *p, *new; psize = (size_t) (pool->d.end - (u_char *) pool); //获取pool的大小 m = ngx_memalign(NGX_POOL_ALIGNMENT, psize, pool->log); //分配一块新的节点 if (m == NULL) { return NULL; } new = (ngx_pool_t *) m; new->d.end = m + psize; new->d.next = NULL; new->d.failed = 0; m += sizeof(ngx_pool_data_t); //这里做了优化,新的节点只使用了ngx_pool_data_t m = ngx_align_ptr(m, NGX_ALIGNMENT); new->d.last = m + size; for (p = pool->current; p->d.next; p = p->d.next) { if (p->d.failed++ > 4) { pool->current = p->d.next; } } p->d.next = new; //把新的节点链接到链表上去。 return m; }ngx_palloc_large
/* @brief: 分配一块size大小的内存,并把该内存链接到pool->large这个链表上去,在size > pool->max的时候才会调用这个函数。 @param pool[in]: 内存池对象。 @param size[in]: 要分配的内存空间大小。 @return: 返回指向改内存空间的首地址的指针。 */ static void * ngx_palloc_large(ngx_pool_t *pool, size_t size) { void *p; ngx_uint_t n; ngx_pool_large_t *large; p = ngx_alloc(size, pool->log); if (p == NULL) { return NULL; } n = 0; for (large = pool->large; large; large = large->next) { if (large->alloc == NULL) { large->alloc = p; return p; } if (n++ > 3) { break; } } large = ngx_palloc_small(pool, sizeof(ngx_pool_large_t), 1); if (large == NULL) { ngx_free(p); return NULL; } large->alloc = p; large->next = pool->large; pool->large = large; return p; }ngx_pmemalign
/* @brief: 以内存对齐的方式,申请一块空间,并放在pool->large链表上。 @param pool[inout]: 内存池对象。 @param size[in]: 要分配的空间大小。 @param alignment[in]: 对齐的字节数,必须是2的倍数。 @return: 返回分配的内存空间的首地址的指针。 */ void * ngx_pmemalign(ngx_pool_t *pool, size_t size, size_t alignment) { void *p; ngx_pool_large_t *large; p = ngx_memalign(alignment, size, pool->log); if (p == NULL) { return NULL; } large = ngx_palloc_small(pool, sizeof(ngx_pool_large_t), 1); if (large == NULL) { ngx_free(p); return NULL; } large->alloc = p; large->next = pool->large; pool->large = large; return p; }ngx_pfree
/* @brief: 从pool->large链表中查找是否存在首地址为p的内存空间,如果存在则释放这块空间。 @param pool[inout]: 内存池对象。 @param p[in]: 要释放的内存空间。 @return: NGX_OK: 释放成功。 NGX_DECLINED: 没有找到。 */ ngx_int_t ngx_pfree(ngx_pool_t *pool, void *p) { ngx_pool_large_t *l; for (l = pool->large; l; l = l->next) { if (p == l->alloc) { ngx_log_debug1(NGX_LOG_DEBUG_ALLOC, pool->log, 0, "free: %p", l->alloc); ngx_free(l->alloc); l->alloc = NULL; return NGX_OK; } } return NGX_DECLINED; }对于被置于大块内存链,也就是被large字段管理的一列内存中的某块进行释放。该函数的实现是顺序遍历large管理的大块内存链表。所以效率比较低下。如果在这个链表中找到了这块内存,则释放,并返回NGX_OK。否则返回NGX_DECLINED。
由于这个操作效率比较低下,除非必要,也就是说这块内存非常大,确应及时释放,否则一般不需要调用。反正内存在这个pool被销毁的时候,总归会都释放掉的嘛!
参考链接
http://tengine.taobao.org/book/chapter_02.html#ngx-pool-t-100
-
-
[Nginx] array数组
结构体定义
/* elts: 指向数组的指针。 nelts: 数组中实际元素的个数。 size: 数组中每个元素的大小。 nalloc: 数组中最多存储的元素的个数。 pool: 数组就是从这个内存池中分配内存的。 size * nalloc 就是数组实际使用的字节数。 */ typedef struct { void *elts; ngx_uint_t nelts; size_t size; ngx_uint_t nalloc; ngx_pool_t *pool; } ngx_array_t;ngx_array_create
/* @brief: 从内存池p中分配一个数组,数组的大小为 n * size 字节。 @param p[inout]: 内存池。 @param n[in]: 数组的元素个数。 @param size[in]: 每个元素的大小。 @return: 返回指向数组对象的指针。 */ ngx_array_t * ngx_array_create(ngx_pool_t *p, ngx_uint_t n, size_t size) { ngx_array_t *a; a = ngx_palloc(p, sizeof(ngx_array_t)); if (a == NULL) { return NULL; } if (ngx_array_init(a, p, n, size) != NGX_OK) { return NULL; } return a; } /* @brief: 初始化数组。 @param array[inout]: 数组对象。 @param pool[inout]: 内存池对象。 @param n[in]: 数组的元素个数。 @param size[in]: 每个元素的大小。 @return: NGX_OK, NGX_ERROR。 */ static ngx_inline ngx_int_t ngx_array_init(ngx_array_t *array, ngx_pool_t *pool, ngx_uint_t n, size_t size) { /* * set "array->nelts" before "array->elts", otherwise MSVC thinks * that "array->nelts" may be used without having been initialized */ array->nelts = 0; array->size = size; array->nalloc = n; array->pool = pool; array->elts = ngx_palloc(pool, n * size); if (array->elts == NULL) { return NGX_ERROR; } return NGX_OK; }ngx_array_push
/* @brief: 从数组中获取一个新的节点。 如果数组还没有满,直接一个新的节点就好了。 如果数组满了,1.数组的内存池空间还没满,就直接给数组增加一个元素。 如果数组满了,2.数组的内存池空间也满了,那就给内存池增加一个2倍于现在数组大小的空间。 @param a[inout]: 数组。 @return: 返回一个指向新元素的首地址的指针,如果内存分配失败返回NULL。 */ void * ngx_array_push(ngx_array_t *a) { void *elt, *new; size_t size; ngx_pool_t *p; if (a->nelts == a->nalloc) { /* the array is full */ size = a->size * a->nalloc; p = a->pool; if ((u_char *) a->elts + size == p->d.last && p->d.last + a->size <= p->d.end) { /* * the array allocation is the last in the pool * and there is space for new allocation */ p->d.last += a->size; a->nalloc++; } else { /* allocate a new array */ new = ngx_palloc(p, 2 * size); if (new == NULL) { return NULL; } ngx_memcpy(new, a->elts, size); a->elts = new; a->nalloc *= 2; } } elt = (u_char *) a->elts + a->size * a->nelts; a->nelts++; return elt; }/* @brief: 和ngx_array_push一样,只不过从一个元素变成了n个元素。 */ void * ngx_array_push_n(ngx_array_t *a, ngx_uint_t n) { void *elt, *new; size_t size; ngx_uint_t nalloc; ngx_pool_t *p; size = n * a->size; if (a->nelts + n > a->nalloc) { /* the array is full */ p = a->pool; if ((u_char *) a->elts + a->size * a->nalloc == p->d.last && p->d.last + size <= p->d.end) { /* * the array allocation is the last in the pool * and there is space for new allocation */ p->d.last += size; a->nalloc += n; } else { /* allocate a new array */ nalloc = 2 * ((n >= a->nalloc) ? n : a->nalloc); new = ngx_palloc(p, nalloc * a->size); if (new == NULL) { return NULL; } ngx_memcpy(new, a->elts, a->nelts * a->size); a->elts = new; a->nalloc = nalloc; } } elt = (u_char *) a->elts + a->size * a->nelts; a->nelts += n; return elt; }
-
[Linux] memalign 和 posix_memalign
memalign
在GNU系统中,malloc或realloc返回的内存块地址都是8的倍数(如果是64位系统,则为16的倍数)。如果你需要更大的粒度,请使用memalign或valloc。这些函数在头文件“stdlib.h”中声明。
在GNU库中,可以使用函数free释放memalign和valloc返回的内存块。但无法在BSD系统中使用,而且BSD系统中并未提供释放这样的内存块的途径。
函数:void * memalign (size_t boundary, size_t size) 函数memalign将分配一个由size指定大小,地址是boundary的倍数的内存块。参数boundary必须是2的幂!函数memalign可以分配较大的内存块,并且可以为返回的地址指定粒度。
函数:void * valloc (size_t size) 使用函数valloc与使用函数memalign类似,函数valloc的内部实现里,使用页的大小作为对齐长度,使用memalign来分配内存。它的实现如下所示:
void * valloc (size_t size) { return memalign (getpagesize (), size); }posix_memalign
SYNOPSIS
#include <stdlib.h> int posix_memalign(void **memptr, size_t alignment, size_t size); [Option End]DESCRIPTION
The posix_memalign() function shall allocate size bytes aligned on a boundary specified by alignment, and shall return a pointer to the allocated memory in memptr. The value of alignment shall be a multiple of sizeof( void *), that is also a power of two. Upon successful completion, the value pointed to by memptr shall be a multiple of alignment.
The free() function shall deallocate memory that has previously been allocated by posix_memalign().
RETURN VALUE
Upon successful completion, posix_memalign() shall return zero; otherwise, an error number shall be returned to indicate the error.
- Jekyll 1
- C/C++ 63
- Linux 59
- Web 25
- Qt 12
- Art 124
- Windows 17
- PHP 8
- Network 16
- GDB 3
- lwip 2
- DesignPattern 6
- pthread 6
- CPrimerPlus 9
- tester 3
- GO 75
- openssl 7
- FreeRTOS 9
- 数据库 4
- vk_mj 7
- transdata 3
- Git 7
- lua 20
- nginx 19
- boost 9
- python 18
- google 1
- Redis 1
- miscellanea 11
- life 2
- GCTT 9
- Rust 15
- C语言 2
- TeX 3
- fp 1